在WSL2 Ubuntu 20.04上连接Realsense D435,运行OpenCV 4.2版本的ORB SLAM2,实现点云构建
绝大多数的步骤请见参考里的前两个链接,此处仅记录实现过程中踩的坑
WSL环境准备
安装Ubuntu20.04,在安装ROS设置key时可能遇到如下报错:
chen@CHEN-ROG:~$ sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
Executing: /tmp/apt-key-gpghome.icMaoQqJHi/gpg.1.sh --keyserver hkp://keyserver.ubuntu.com:80 --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
gpg: connecting dirmngr at '/run/user/0/gnupg/d.fq4e4j8nmokbdb8y9hp9q8ya/S.dirmngr' failed: IPC connect call failed
gpg: keyserver receive failed: No dirmngr尝试sudo apt-get install dirmngr无法解决问题,更换如下命令后成功设置key
curl -sL "http://keyserver.ubuntu.com/pks/lookup?search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654&op=get" | sudo apt-key addPangolin
经过实际测试,我成功编译安装了0.6版本的Pangolin,源代码可从Github(https://github.com/stevenlovegrove/Pangolin/releases/tag/v0.6)下载
sudo apt-get install libxkbcommon-dev
sudo apt-get install wayland-protocols
sudo apt install libglew-dev
cd Pangolin
mkdir build
cd build
cmake ..
make -j
sudo make installEigen
经过测试,3.3.7版本的Eigen可正常工作
OpenCV
Ubuntu 20.04系统内已经安装好了4.2版本的OpenCV,无需再次进行安装
USB连接
安装 USBIPD-WIN 项目(https://github.com/dorssel/usbipd-win/releases)
以管管理员身份开启powershell,执行下面命令可打印出设备总线ID
usbipd list执行下面的命令来共享设备
usbipd bind --busid 4-4执行下面命令来将设备连接至WSL
usbipd attach --wsl --busid 4-4执行下面命令来断开连接
usbipd detach --busid 4-4Ubuntu系统内可通过lsusb命令查看连接情况
ORB SLAM2
OpenCV 4.2版本的可以从Github(https://github.com/dolf321/ORB_SLAM2_OPENCV4)上下载,这个仓库里的代码修正了官方代码的很多问题,绝大多数文件已经添加了#include <unistd.h>,但是在执行build_ros.sh的时候仍然需要检查
编译报错 ‘slots_reference’ was not declared in this scope
在执行build.sh时可能出现这个报错,解决办法是终端执行:
sed -i 's/++11/++14/g' CMakeLists.txt话题修改
realsense2_camera发布的RGB图像和深度图像话题与ORB SLAM代码监听的不一样,这需要去改一下源码,位置大概在ORB_SLAM2_OPENCV4/Examples/ROS/ORB_SLAM2/src/ros_rgbd.cc,将68、69行修改为,修改完成记得重新编译
message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/camera/color/image_raw", 1);
message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "/camera/aligned_depth_to_color/image_raw", 1);通过修改rs_rgbd.launch来改变图像的话题也可实现相同的功能,具体可见参考中的GitHub链接
相机内参
打开两个终端,分别执行下面的命令
roslaunch realsense2_camera rs_camera.launch
rostopic echo /camera/color/camera_infoExamples/RGB-D中新建RealSense.yaml文件,根据内参修改并保存以下内容:
%YAML:1.0
#--------------------------------------------------------------------------------------------
# Camera calibration and distortion parameters (OpenCV)
Camera.fx: 606.2763671875
Camera.fy: 605.233154296875
Camera.cx: 319.2896728515625
Camera.cy: 246.07589721679688
Camera.k1: 0.0
Camera.k2: 0.0
Camera.p1: 0.0
Camera.p2: 0.0
Camera.k3: 0.0
Camera.width: 640
Camera.height: 480
#Camera frames per second
Camera.fps: 30.0
#IR projector baseline times fx (aprox.)
Camera.bf: 30.3
#Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale)
Camera.RGB: 1
#Close/Far threshold. Baseline times.
ThDepth: 40.0
#Deptmap values factor,将深度像素值转化为实际距离,原来单位是 mm,转化成 m
DepthMapFactor: 1000.0
#ORB Parameters
#--------------------------------------------------------------------------------------------
#ORB Extractor: Number of features per image
ORBextractor.nFeatures: 1000
#ORB Extractor: Scale factor between levels in the scale pyramid
ORBextractor.scaleFactor: 1.2
#ORB Extractor: Number of levels in the scale pyramid
ORBextractor.nLevels: 8
#ORB Extractor: Fast threshold
#Image is divided in a grid. At each cell FAST are extracted imposing a minimum response.
#Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST
#You can lower these values if your images have low contrast
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7
#--------------------------------------------------------------------------------------------
#Viewer Parameters
#--------------------------------------------------------------------------------------------
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1
Viewer.GraphLineWidth: 0.9
Viewer.PointSize:2
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3
Viewer.ViewpointX: 0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -1.8
Viewer.ViewpointF: 500运行
添加以下环境变量
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/(修改为你的路径)/ORB_SLAM2_OPENCV4/Examples/ROS安装一个依赖包
sudo apt-get install ros-noetic-rgbd-launch启动深度相机节点
roslaunch realsense2_camera rs_rgbd.launch启动ORB SLAM
cd /home/(修改为你的路径)/ORB_SLAM2_OPENCV4
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/RGB-D/RealSense.yaml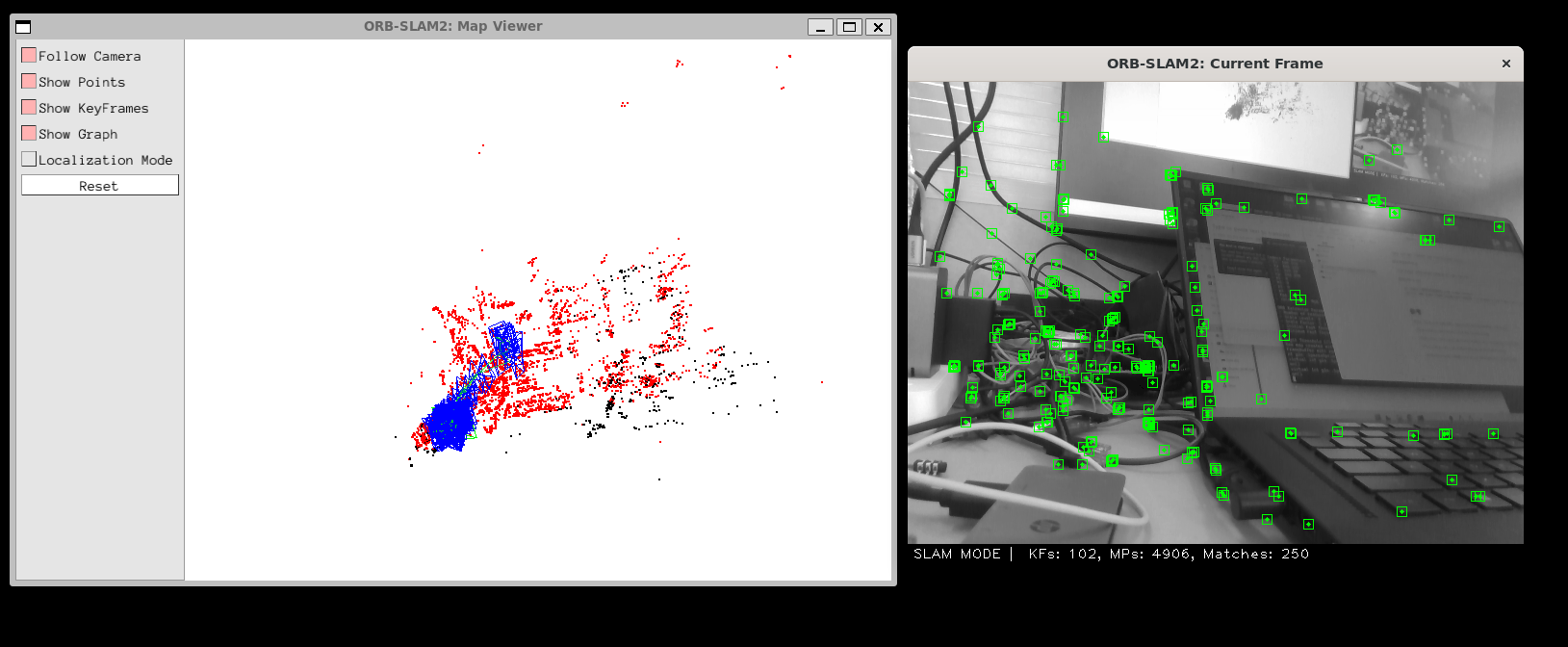
参考
https://blog.csdn.net/2301_80007161/article/details/137022723
https://github.com/ppaa1135/ORB_SLAM2-D435
https://blog.csdn.net/chengyanshan0701/article/details/101037947
针不戳
李昊阳 2024-07-09