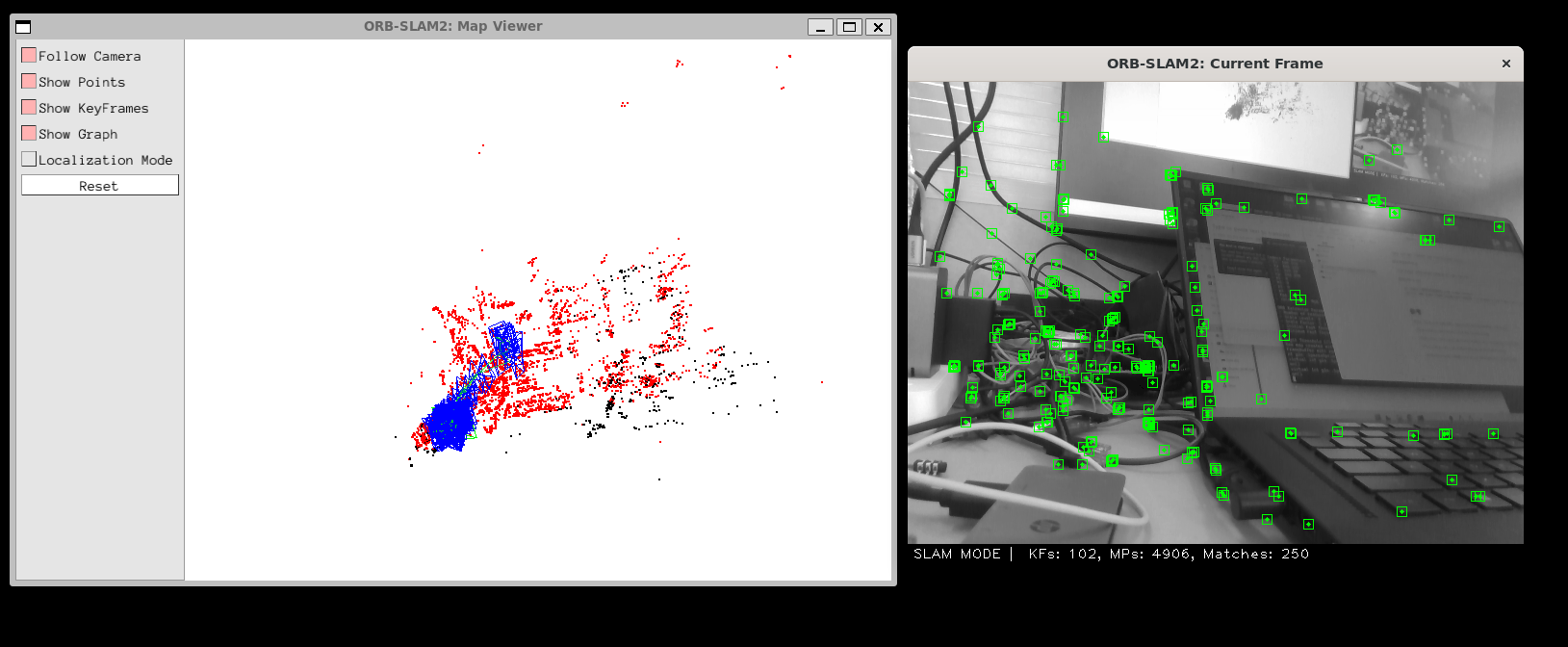
D435运行ORB SLAM2(OpenCV 4.2) 2024-06-18 ROS 3314 次阅读 1 评论 在WSL2 Ubuntu 20.04上连接Realsense D435,运行OpenCV 4.2版本的ORB SLAM2,实现点云构建继续阅读